I. Systemoversikt
1. Prosjektbakgrunn
I de senere årene har ulovlig transport av godskjøretøy på motorveier blitt et alvorlig problem som setter den nasjonale trafikksikkerheten i fare. Det overbelaster motorveier og broer, noe som reduserer levetiden til veier og broer betraktelig. Samtidig reduseres kjøretøyenes sikkerhetsfaktor betraktelig, noe som stadig forårsaker trafikkulykker. Det er også lett å forårsake trafikkork og miljøforurensning.
Myndigheter på alle nivåer over hele landet har kontinuerlig økt sin innsats for å kontrollere overbelastet transport av motorveikjøretøy og har oppnådd viktige fasede resultater. På grunn av komplekse sosiale og økonomiske faktorer er imidlertid den nasjonale situasjonen for overbelastningsdeteksjon fortsatt svært alvorlig, og de skjulte farene for rebound er ikke eliminert. Det er fortsatt under stort press å konsolidere resultatene av styringen og kontinuerlig fremme arbeidet med overbelastningsdeteksjon. Derfor er styringen av overbelastet transport av kjøretøy et langsiktig og daglig arbeid som må videreføres. Det er avgjørende å innlemme styringen av overbelastet arbeid i en langsiktig mekanisme. Den spiller også en juridisk avskrekkende rolle for overbelastede kjøretøy, og kan også utvide funksjonene til å gjøre det til en veiinspeksjon, slå ned på tilfeldighetene rundt ulovlig transport, og rettidig kontrollere og eliminere ulike ulovlige transportoperasjoner, inkludert overbelastet transport.
2. Introduksjon til veiesystem
Veieprinsippet til statiske lastebilvekter er å parkere alle kjøretøy på veieplattformen for å veie hele kjøretøyet. Den har høy veienøyaktighet og klare nasjonale standarder. Imidlertid kan konvensjonelle lastebilvekter bare måle vekten av hele kjøretøyet, men ikke akselvekten. Den kan bedømme om hele kjøretøyet er overbelastet, men ikke om akselvekten er overbelastet. Den kan ikke oppfylle kravene til vegvesenet for å håndtere overbelastet transport.
Denne planen kombinerer selskapets mangeårige erfaring med design og produksjon av overbelastningsdeteksjonsutstyr og dets faktiske anvendelse i ulike regioner av landet, studerer nøye bruken av ulike overbelastningsdeteksjonsutstyr på markedet, og vurderer grundig de spesifikke behovene til veiforvaltningsavdelinger for håndtering av overbelastet transport. Den tar i bruk avansert teknologi og unike designideer for å utvikle et dynamisk høypresisjonssystem for kjøretøyvekt og akseltypedeteksjon. Det kan veie både akselvekt og totalvekt, og kan skille mellom akseltyper. Akselvektnøyaktigheten kan også forbedres betraktelig.
2. Sammensetning av overbelastnings- og overbegrensningssystemet
1. Systemfunksjoner
Den kan veie kjøretøy som passerer i lav hastighet og automatisk avgjøre om kjøretøyets vekt eller akselvekt er overbelastet;
Den kan oppdage antall aksler, akselgruppe, akselvekt og kjøretøyets kjøretøyvekt;
Den kan danne fullstendig informasjon om kjøretøyets veiing, inkludert akseltype, akselvekt, akselgruppe og totalvekt;
Den kan overføre veieinformasjon til datamaskinen via datagrensesnittet;
Kjernedelen av systemet bruker modent og pålitelig utstyr, som alle har modulær design, er enkle å vedlikeholde og utvide, noe som sikrer systemets høye pålitelighet.
Systemprogramvaren er moden, svært pålitelig, dataene er komplette og effektive, og de kan deles fullt ut, noe som effektivt forbedrer arbeidseffektiviteten og eliminerer ulike smutthull i administrasjonen i størst mulig grad.
2. Systemprosess
Lastebilen føres inn i veiefeltet til overlaststasjonen, og registreringssystemet for nummerskilt identifiserer nummerplaten;
Dekk-(aksel-)identifikatoren skiller antall aksler, og kjøretøyets veiesystem begynner å veie, bestemme akselgruppen og beregne akselvekten.
Når alle kjøretøyene passerer gjennom kjøretøyseparatoren og kommer inn på veieplattformen, og vekten er i en relativt balansert tilstand, registreres kjøretøyets totalvekt og akselvekten beregnes.
Veiesystemet sender veieinformasjon (skiltnummer, antall aksler, akselvekt, total kjøretøyvekt osv.) til deteksjonsdatamaskinen. Datamaskinen avgjør om den er overbegrenset og viser deteksjonsinformasjonen som kjøretøyvekt, overgrense og overgrensemengde på skjermen.
Etter at kjøretøyet har fullført de relevante operasjonene, slipper kjøretøyets guidepersonell de ikke-overbegrensede kjøretøyene ut av deteksjonsområdet i henhold til informasjonen på skjermen, veileder de overbegrensede kjøretøyene inn i stasjonsområdet for behandling, skriver ut inspeksjonsskjemaet for overbegrensede kjøretøy og utfører relevante ladeoperasjoner;
3. Systemsammensetning og layoutplan
3.1 Systemsammensetning
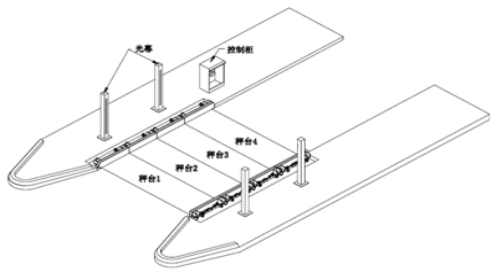
Overgrense- og overbelastningssystemet består av ZDG dynamisk akselvekt med fire bord, kontrollinstrument, infrarød kjøretøyseparator, veieplattform hjulakselidentifikator, kontrollskap (valgfritt utstyr: registreringsskiltgjenkjenningssystem, LED-storskjermsystem, talemeldingssystem, kjøretøystyringssystem, industriell datamaskin, billettskriver, UPS avbruddsfri strømforsyning, programvare for overgrense- og overbelastningsdeteksjonssystem, overvåkingssystem) og annet tilbehør og kabler.
3.2 Systemoppsettdiagram som vist:
Arbeidsflyt:
1) Kjøretøy kjører inn i kjørefeltet i rekkefølge mens de holder trygg avstand, og utløser dermed den infrarøde kjøretøyseparatoren;
2) Hver aksel på kjøretøyet passerer gjennom veieplattformen med flere overflater;
3) Skjermkontrolleren behandler veiesignalet som er hentet fra sensoren på veieplattformen og hjulsensorsignalet, separerer akselen i henhold til de logiske betingelsene og håndterer effektivt spesielle situasjoner;
4) Bakenden av kjøretøyet forlater flerflateveieplattformen og den infrarøde kjøretøyseparatoren;
5) Skjermkontrolleren vurderer kjøretøyets sluttsignal omfattende basert på okklusjonssignalet som oppdages av den infrarøde kjøretøyseparatoren og veiesignalet som innhentes av veiesensoren;
6) Skjermkontrolleren behandler veiesignalet som oppnås når det ovennevnte kjøretøyet passerer veieplattformen;
7) Skjermkontrolleren genererer fullstendig veieinformasjon for hele kjøretøyet, og den fullstendige veieinformasjonen inkluderer kjøretøyets hastighet, akseltype, akselvekt, akselgruppevekt, totalvekt osv.;
8) Fullfør veiingen av ett kjøretøy og vent på veiingen av det neste kjøretøyet
9) Under hele arbeidsprosessen håndterer systemet automatisk ulike spesielle situasjoner, som full inn- og utkjøring, gjentatt inn- og utkjøring, og lengre opphold på veieplattformen;
Systemet kan automatisk og effektivt håndtere følgende kjøretøysituasjon, og veiingen av det følgende kjøretøyet har ingen effekt på datanøyaktigheten.

Publisert: 20. feb. 2025